HK330 Computer CNC panel serrieq
Video tal-Prodott
Il-pannell CNC tal-kompjuter raw HK330
1. Skond il-wisa 'tal-pjanċa tad-dħul, aqta' l-pjanċa meħtieġa u malajr lura għall-istat tax-xogħol oriġinali.
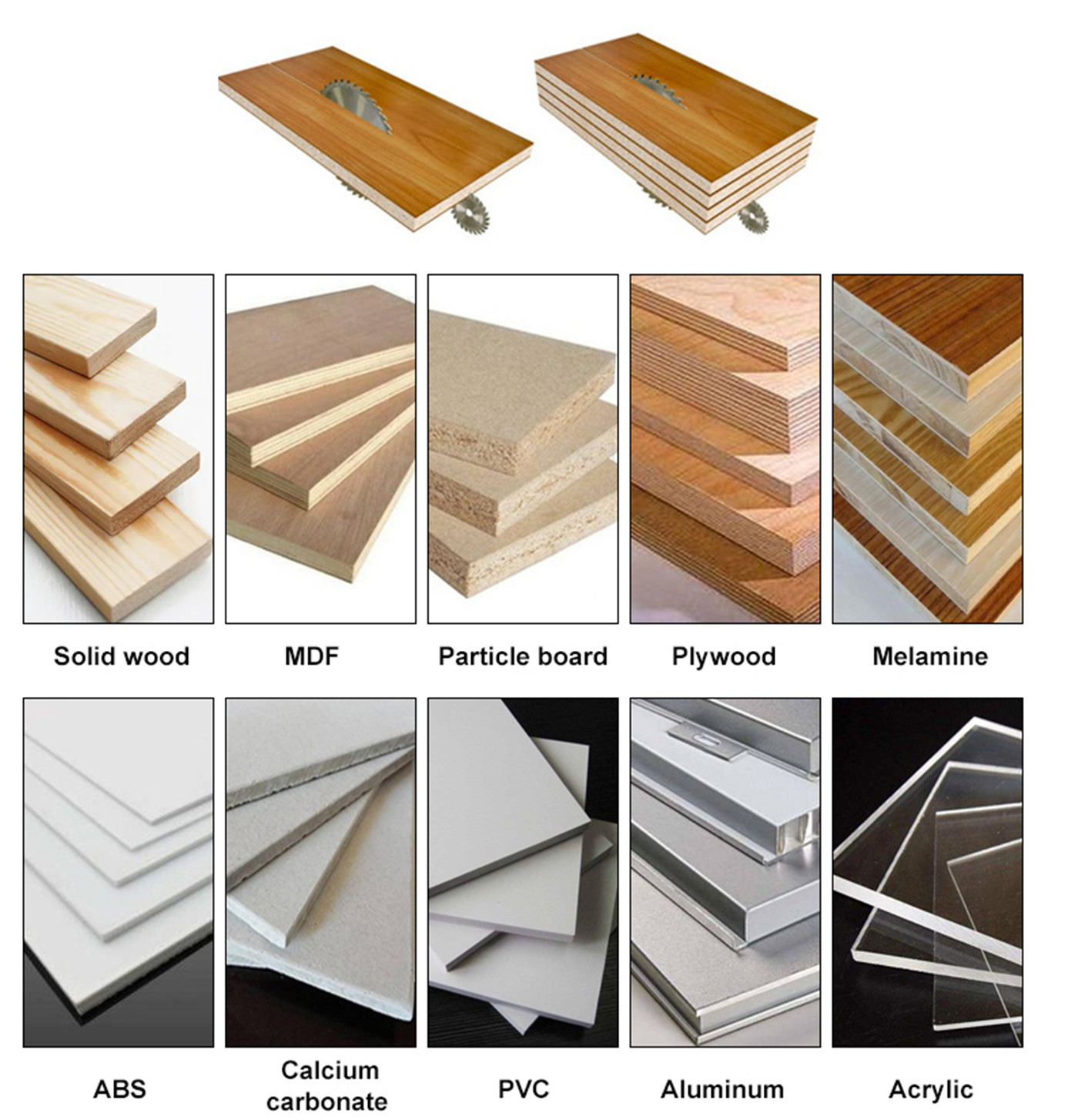
2. Il-veloċità tat-tqattigħ hija kkontrollata minn konvertitur tal-frekwenza, li jista 'jegħleb pjanċi ta' ħxuna differenti u materjali differenti.
3. L-għalf jadotta tabella żibġa f'wiċċ l-ilma pnewmatiku, u l-materjal tal-pjanċa tqila huwa faċli biex jinbidel. Ir-robot awtomatikament jitma ', għandu intensità baxxa tax-xogħol u effiċjenza għolja fil-produzzjoni.
4. Uża mutur servo Delta importat biex telimina żball artifiċjali u ttejjeb l-eżattezza dimensjonali.
Parametri tekniċi
| HK330 | PARAMESTRU |
| Veloċità massima tat-tqattigħ | 0-80m/min |
| Veloċità Massima tat-Trasportatur | 100m/min |
| Qawwa tal-Mutur tas-Serrieq Prinċipali | 16.5kw (mhux obbligatorju 18.5kw) |
| Qawwa Totali | 26.5kw (mhux obbligatorju 28.5kw) |
| Daqs Massimu tax-Xogħol | 3300L * 3300W * 100H (mm) Fakultattiv 120H (mm) |
| Daqs Minimu tax-Xogħol | 34L * 45W (mm) |
| Daqs Ġenerali | 5300L * 5950W * 1900H (mm) |

Tissodisfa r-rekwiżiti tal-ipproċessar tal-pjanċa kbira, b'daqs massimu tas-serrar ta '2800 * 2800mm u ħxuna tas-serrar ta' 105mm, u applikabilità usa '

Servo mekkaniċi clamp idejn 11 wieħed l-akbar disinn clip mekkaniku

Id-driegħ robotiku jadotta reducer tal-irkaptu tad-dudu ta 'preċiżjoni għolja u rack tal-irkaptu tal-għalf, bi preċiżjoni tat-tqattigħ ta' ± 0.1mm
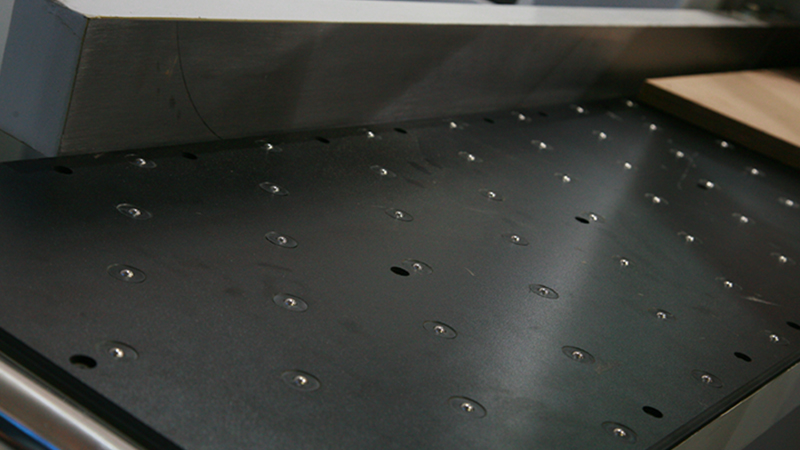
Il-worktable hija magħmula minn Pneumatic floating platform.its faċli ħafna biex iċċaqlaq il-pannelli
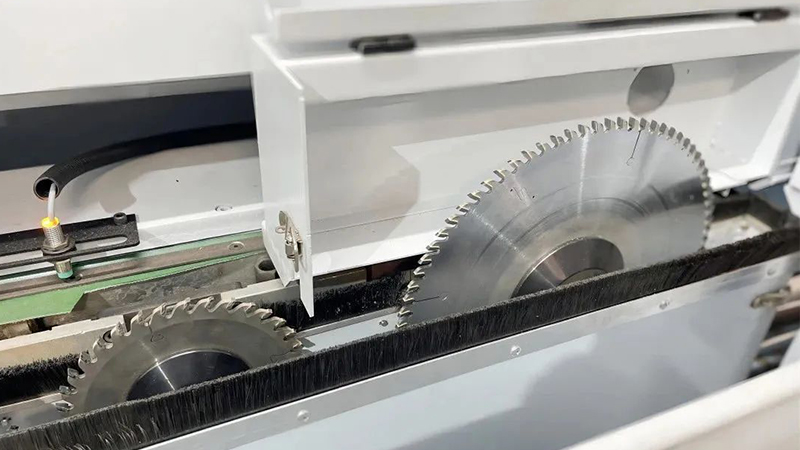
Is-serrieq tal-punteġġ jista 'jinbidel awtomatikament skont il-ħtiġijiet tas-serrar. Ikkoopera mas-serrieq prinċipali għal serrar ta 'kwalità għolja
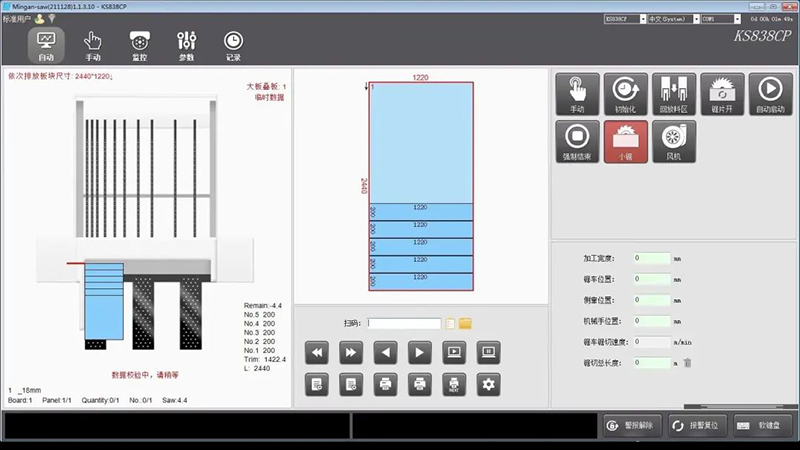
Softwer ta 'ottimizzazzjoni mhux obbligatorju għall-ottimizzazzjoni awtomatika tat-tqassim tal-materjal u
Kampjun